")
")


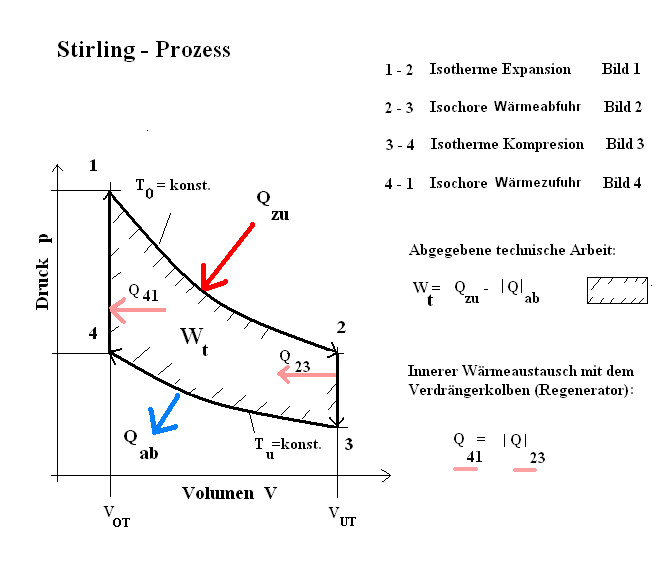
Bei einem idealen Stirlingprozess gibt es 4 nacheinander ablaufende Zustandsänderungen.
1. Die Luft expandiert isotherm (also bei konstanter Temperatur).
2. Sie wird nach der Expansion isochor (d.h. bei konstantem Volumen) abgekühlt.
3. Danach wird sie isotherm komprimiert.
4. Sie wird wieder isochor aufgeheizt auf die Anfangstemperatur.
By Kino from Wikimedia Commons
Die vier nacheinander ablaufenden Takte betreffen den idealen Stirlingprozess.
Leider kann ein idealer Stirlingprozeß nicht realisiert werden, da man keine kontinuierlich laufende Maschine konstruieren kann, in der isochore Zustandsänderungen ablaufen können.
Mit dem in der Animation gezeigten Motor, mit einem kontinuierlich laufenden Kurbeltrieb, kann man den idealen Prozess annähern durch den Phasenversatz bei der Bewegung des Arbeitskolbens und des Verdrängers. Dabei überlappen sich jedoch die 4 Takte: So findet bei der Expansion auch gleichzeitig schon ein Gaswechsel von heiß nach kalt statt, und während der Kompression ist noch nicht die gesamte Luft im kalten Teil des Motors.
Der reale Stirlingprozess wird durch die oval aussehende Kurve im P-V Diagramm repräsentiert. Der Motor funktioniert nur bei ausreichender Temperaturdifferenz zwischen heißer und kalter Seite. Diese Differenz wird in Kelvin (K) (Erklärung Kelvin) ausgedrückt. 1990 wurde durch Dr. Senft von der Universität Wisconsin und von Professor Kolin die bisher praktische untere Grenze für den Betrieb von Stirlingmotoren gesetzt. Diese Differenz liegt bei nur 0,5 Kelvin und ist bis jetzt Weltrekord. Die entstehende mechanische Energie ist gleich der Differenz zwischen zugeführter Wärmeenergie und der an den Kühlmantel abgegebenen Energie. Des weiteren sind natürlich auch die Reibungsverluste der Maschine zu berücksichtigen.
 (Own work (Original text: eigene)) [GFDL (http://www.gnu.org/copyleft/fdl.html)], via Wikimedia Commons")